About Me
ROTATING BOOM CRANES
The crane configuration, consisting of the boom tip (i.e., the end of crane boom away from the pedestal), the cables connecting the tip and the object to be moved, and the load, forms a forced-pendulum system. A pendulum system means a system consisting of a point in space, which we call the pendulum point, a pendulum, and a cable connecting the point and the pendulum. The system is forced by acceleration of the pendulum point.
The anti-sway problem in which the pendulum point is constrained to move in a straight line (e.g., gantry and overhead cranes) is called two-dimensional anti-sway problem. The solution to this problem is well known and forms the basis for SmartCrane’s other products.
For a rotational single crane boom however, the boom tip can only move on the sphere centered at the base of the boom. The path travel by the pendulum does not lie in a single plane as in the two-dimensional anti-sway problem and so we call this the three-dimensional anti-sway problem. Similar to the two-dimensional system we use a double-pulse technique in both slew and luff directions. The difficulty here is the curvature of the sphere. In the two-dimensional anti-sway problem, anti-sway acceleration vectors have the same direction at all times. Constrained to the sphere, the pendulum point cannot always accelerate in the correct direction at the time required.
SmartCrane’s patented method (U.S. Patent No. 5,961,563) solves this problem with a unique code that tracks and transposes accelerations from one tangent plane where the demand acceleration is imposed to another tangent plane where the response acceleration is required to cancel the sway.
The SmartCrane software also compensates for motion of the crane base, for installations on floating platforms.
*The mobile harbour cranes in these demonstrations did not have effective speed control in the slew gear motors and could not respond to anti-sway speed demands in all cases, thus limiting the commercial application.
Scale Model
Anti-Sway Control for Rotating Boom Cranes
SmartCrane’s patented anti-sway software has been tested on a scale model crane in the laboratory and successfully demonstrated moving containers with large Mobile Harbor Cranes, in Freeport, Texas and Antwerp, Belgium.*
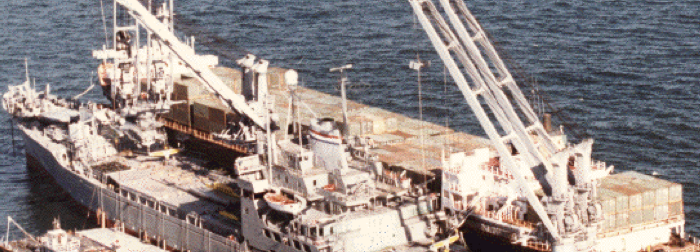
crane ships are affected by seas and also by the natural pendulum sway induced by moving the load
The wooden structure is a faithful 1/8 scale model of the Navy's rotating boom cranes as shown in the picture above.
The model is running and was used as a testbed for the mobile harbour crane installations.


©Copyright 2018 by SmartCrane, LLC - All rights reserved.
